Autonomously controlled a CrazyFlie 2.0 through a 3D environment with obstacles. Developed a geometric nonlinear controller and implemented constant speed trajectory. Implemented two graph search algorithms: Dijkstra’s algorithm and A*
Map 1: Maze

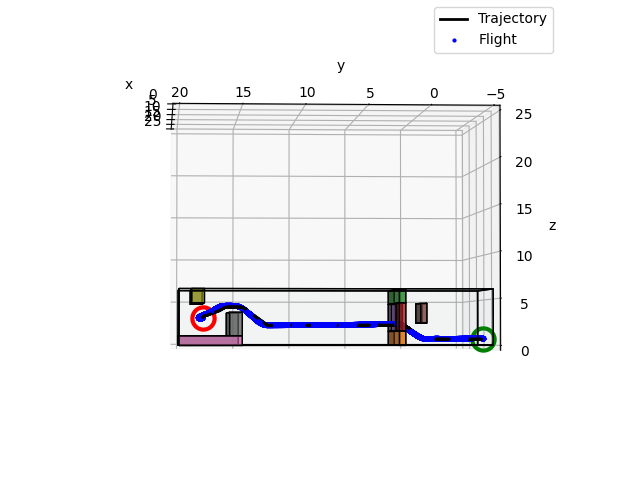
Trajectory and flight path
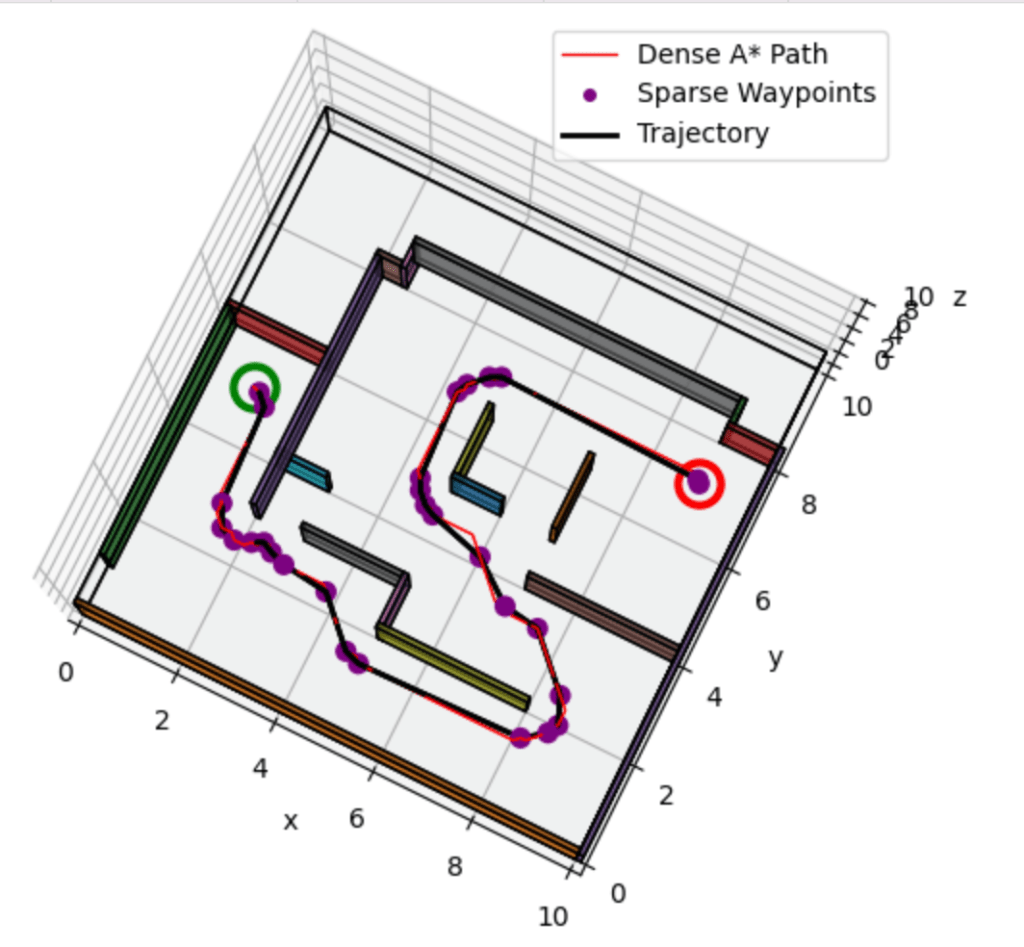
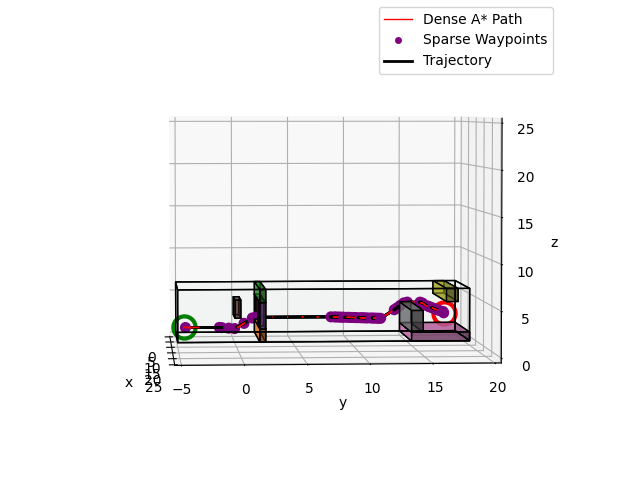
A* Path, Waypoints, and Trajectory
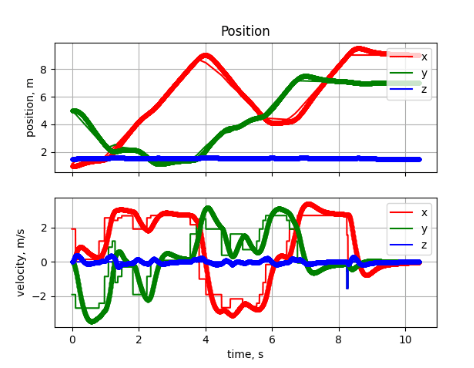
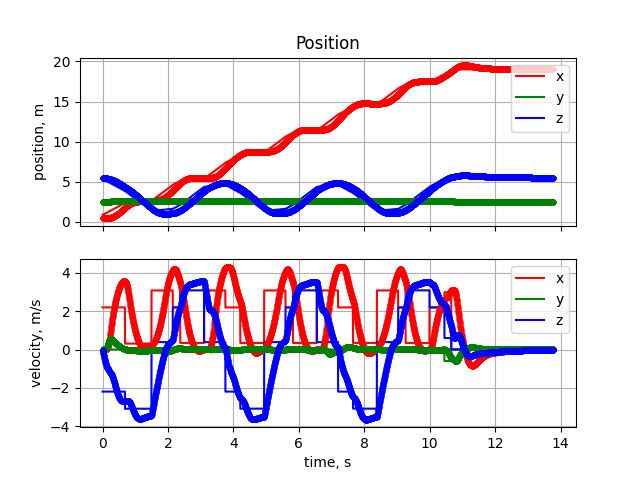
Position vs Time plot
Map 2: Over Under
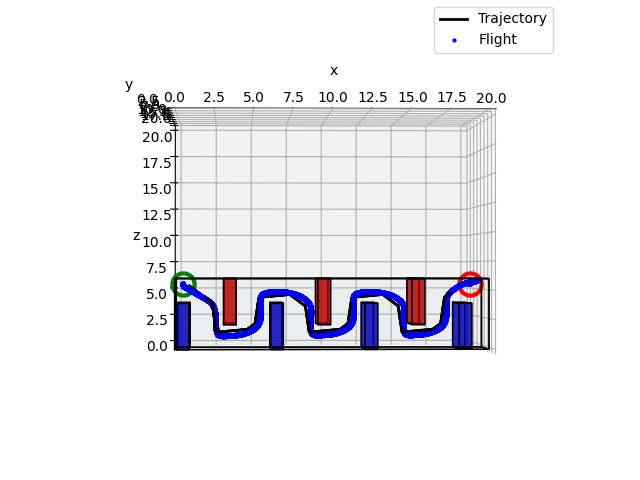
Trajectory and flight path
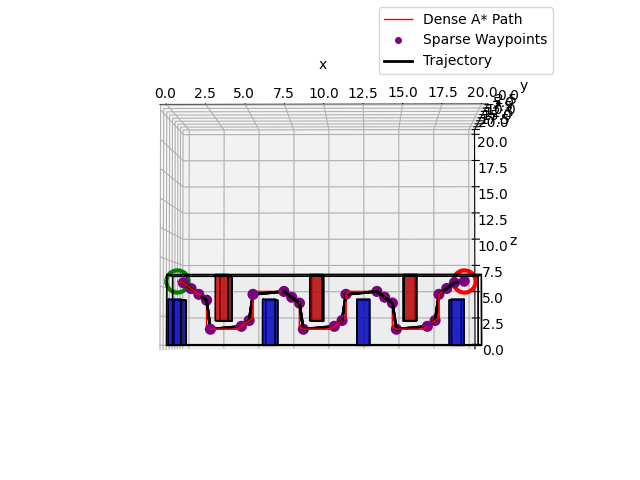
A* Path, Waypoints, and Trajectory
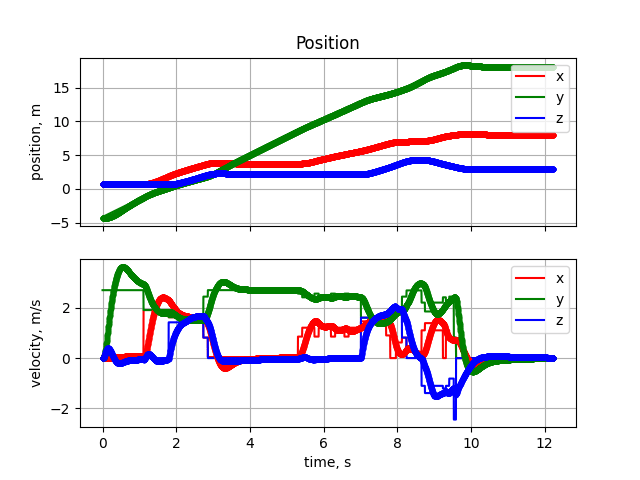
Position vs Time plot
Map 3: Window
Trajectory and flight path
A* Path, Waypoints, and Trajectory
Position vs Time plot
Code: click here
