

I’m currently working along with Mr. Uday Singh and Mr. Santosh Xavier to build Weed-killer bot: Grobot with a main aim to autonomously navigate in a garden or an agricultural land to detect and clear out crabgrass and weeds.
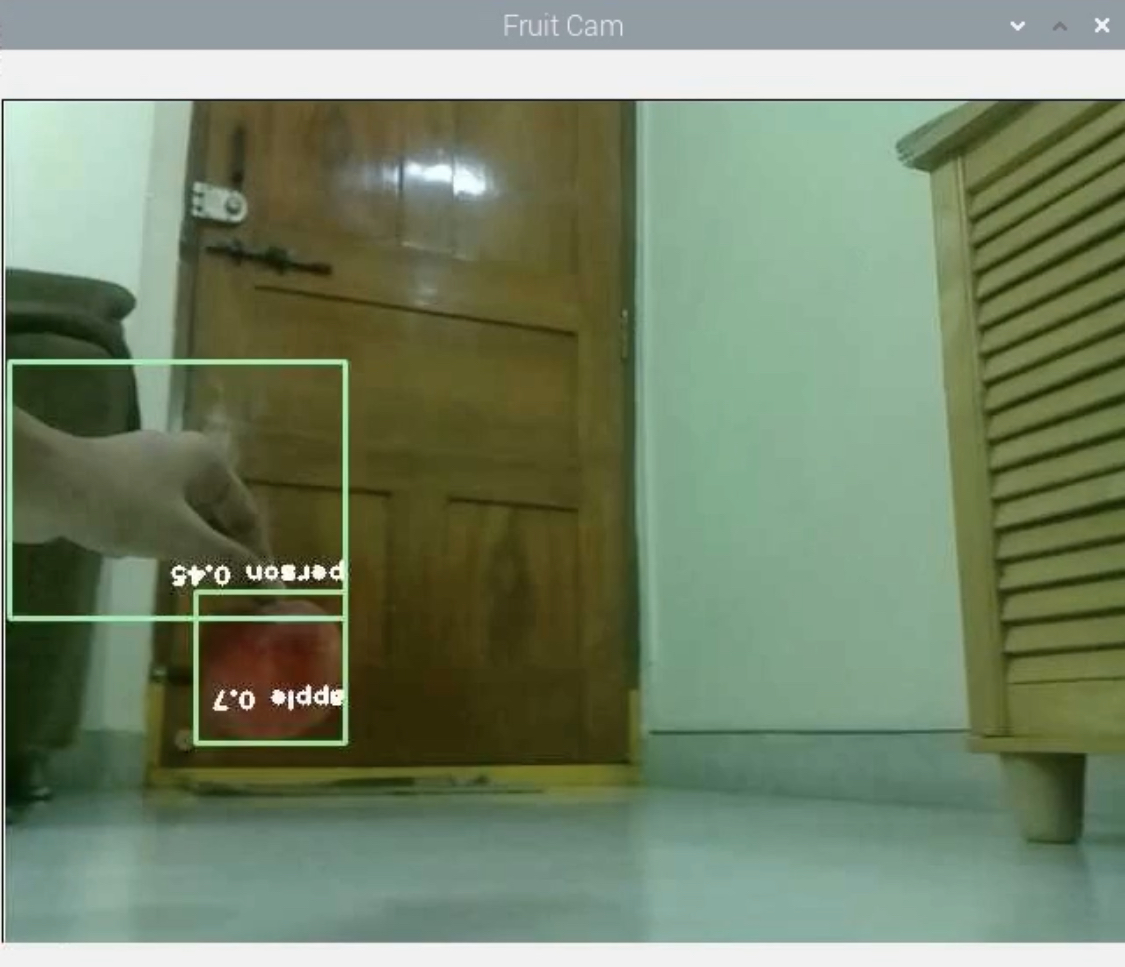
The key areas of focus are: Autonomous Navigation, Weed Detection, Precise weed spraying mechanism (planning to use a robotic arm to pluck weeds next)
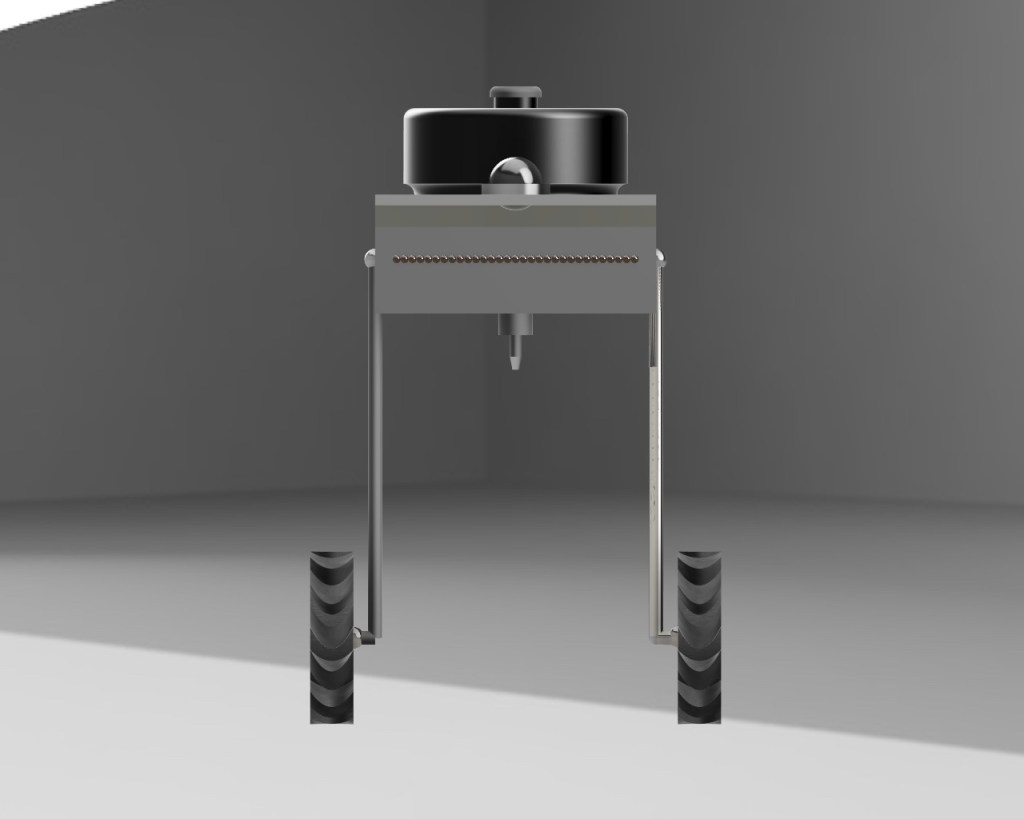
Grobot Components: Raspberry Pi 4b, 12V DC Geared Motors, L298n Motor Controllers, 88 Wh Li-ion Battery for Motors, 80 Wh Li-ion Power bank for Raspberry Pi 4, 1.5 liters per min 12V DC pump, 12V DC Solenoid Valve, 1/4″ Spray Nozzle
Software Tools used: Python with OpenCV library for Optical Recognition, Chassis design using Fusion360 and analysis on ANSYS, Robotics arm prototype on MATLAB

Selected as one of the top 60 teams out of 6000 teams across India based on our prototype demonstration-autonomous weed killing robot- Grobot.
Feb 2021
The Agri India Hackathon was organized by Pusa Krishi, ICAR – Indian Agricultural Research Institute (IARI), Indian Council of Agricultural Research (ICAR) & Department of Agriculture, Cooperation & Farmers’ Welfare, Ministry of Agriculture & Farmers’ Welfare, India.
